


.png)








.jpg)



.jpg)




.jpg)

.jpg)


.jpg)
.png)








.jpg)
.jpg)

.jpg)


.jpg)

.jpg)
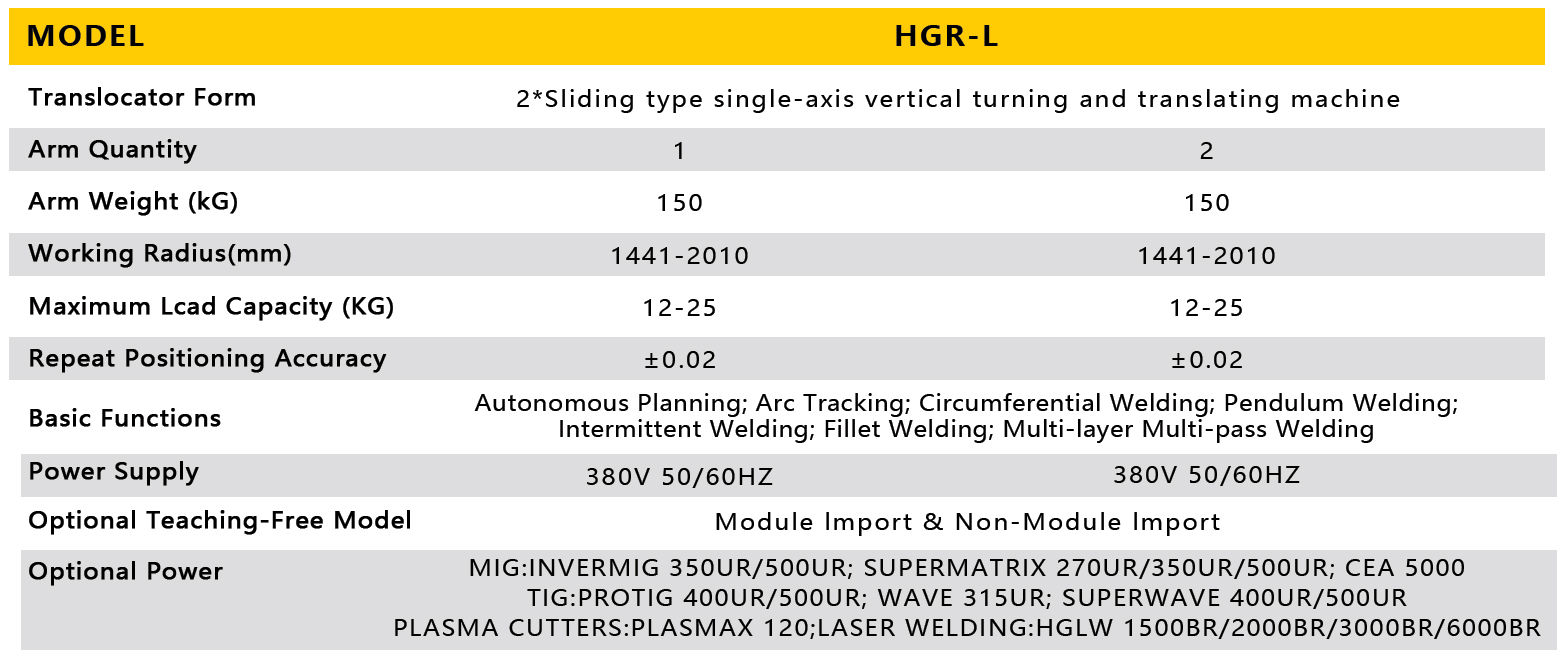
HGR-L SERIES
HUGONG ROBOT L-SHAPED WORKSTATION




 Address:7177 Waiqingsong Road.Qingpu District , Shanghai , PRC
Address:7177 Waiqingsong Road.Qingpu District , Shanghai , PRC Post Code: 201700
Post Code: 201700 E-mail:sales@hugong.com
E-mail:sales@hugong.com Tel:0086-21-51211666
Tel:0086-21-51211666 Fax:+86-21-69715399
Fax:+86-21-69715399















